Objectifs scientifiques
L’exploration et l’exploitation industrielle de l’océan profond – un des environnements les moins connus de notre planète- pour un large éventail de ressources (pétrole, gaz, pêche, bientôt des minéraux, …) soulève des préoccupations mondiales sur leurs impacts écologiques. Ainsi, comprendre la répartition, l’abondance et la dynamique de la matière organique (MO) particulaire et des organismes vivants dans l’environnement profond, dans le temps et l’espace, s’avère crucial pour décrire et prévoir la dynamique des écosystèmes. Il s’agit notamment de comprendre le cycle de son substrat majeur, le carbone biogénique, et de documenter la réponse des écosystèmes aux perturbations anthropiques. Il est également essentiel de contraindre la séquestration de la MO dans les sédiments profonds, à l’échelle millénaire, au regard de son rôle sur les effets du changement global.
C’est ainsi, qu’afin de répondre à ces questionnements, la communauté scientifique développe, depuis quelques années, des observatoires océanographiques, profonds et littoraux, fixes ou mobiles, telle la station benthique du LSCE ou bien encore le robot benthique semi-autonome BathyBot, du MIO et mis en œuvre par la DT de La Seyne-sur-Mer.
Le BathyBot, robot contrôlé à distance, sera déployé à 2500 m de profondeur, à 40 km de Toulon, près de la station MOOSE/ANTARES dans le cadre de l’infrastructure EMSO ERIC. Ce robot benthique complétera la ligne instrumentée pélagique, ALBATROSS-MII, instrumentée avec des capteurs océanographiques. Grace à sa mobilité, ses capteurs, analyseurs et caméras, ce robot sur chenilles ouvre sur des stratégies de surveillances adaptatives, permettant une acquisition d’observations en temps réel et sur le long terme, autour de points stratégiques, de l’environnement marin profond.
Seront embarquées des sondes de température, d’O2 et CO2 dissous, de vitesse et direction du courant, de salinité, de turbidité et une caméra permettant l’acquisition d’images de la faune benthique et pélagique profonde avec une sensibilité suffisante pour détecter les organismes bioluminescents.
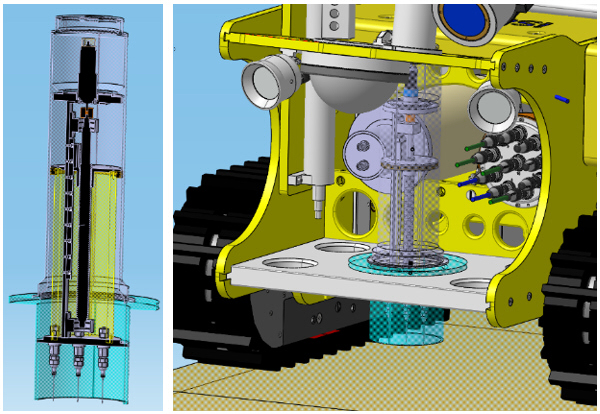
Dans ce contexte, l’implantation d’un profileur benthique (Bathy-prof), équipé de micro-optodes, capable de mesurer des micro-profils d’oxygène à l’interface eau-sédiment, zone de concentration importante de la matière organique sur le plancher océanique, permettra d’accéder à l’utilisation benthique des substrats carbonés nécessaires au métabolisme de l’écosystème observé. Ce profileur permettra de faire le lien avec les mesures de flux de carbone dans la colonne d’eau et le métabolisme dans l’eau de fond. Il permettra de quantifier les variations de ce métabolisme benthique en lien avec les observations visuelles obtenues par les caméras et le mesures physico-chimiques.
Description technique
Nous envisageons donc un développement en trois étapes :
2020 a été consacrée à la réalisation d’une pré-étude d’implantation d’un profileur benthique sur le robot BathyBot. Cette pré-étude a porté sur les choix mécaniques, la conception de cylindres étanches, de moteurs pouvant résister à 2500 m de profondeur et permettant des déplacements verticaux, à l’interface eau-sédiment, à pas micrométriques et sur l’électronique. Cette pré-étude débouchera sur la réalisation des plans de la nouvelle mécanique (enceinte, passage de fibre, profileur, …).
Pour l’électronique, l’étude porte sur le système d’acquisition et de contrôle/commande en lien avec les stratégies de mesures in-situ. Et enfin une IHM sera développée. Ces travaux se font avec la DT de La Seyne-sur-Mer et devaient nécessiter au moins un déplacement des équipes de la DT de Meudon et du LSCE sur site, déplacement que le confinement a empêché.
En 2021, après l’étude précédente, la phase de réalisation de la mécanique de l’électronique et informatique pourra débuter :
- Poursuite de la conception mécanique, calculs de résistance à la pression puis usinage.
- Réalisation de la nouvelle électronique (acquisition, déplacements, communication, alimentation).
- Réalisation des programmes informatiques de contrôle du fonctionnement.
- Intégration de l’ensemble du profileur.
- Tests de bon fonctionnement sur paillasse, puis en caissons hyperbare, puis en piscine (20 m) et préparation de l’implantation sur le BathyBot.
En 2022, implantation sur BathyBot pour déploiement pendant sa maintenance après relevage.
Contact DT : Oualid Aouji
Contact LSCE : Bruno Bombled