Objectif scientifique
Le laboratoire développe depuis 2015 une nouvelle génération du capteur d’imagerie Underwater Vision Profiler (UVP). Ce développement se fait dans le cadre du projet H2020 BRIDGES de conception d’un glider profond (2000 m) et ultra profond (6000 m) qui inclut la réalisation ou l’intégration de capteurs dédiés à des domaines d’activité.
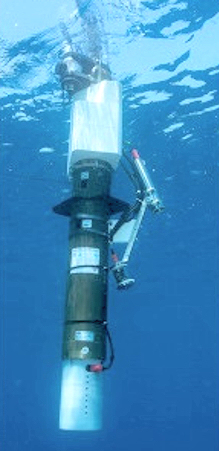
Ce nouvel instrument appelé UVP6 est destiné à tous les supports ou vecteurs ayant des ressources énergétiques limitées, des contraintes de poids et de bande passante pour la transmission des données : bouées, mouillages, flotteurs, gliders, AUV…
L’instrument permet d’obtenir les mêmes données que l’UVP : spectres de taille de la matière particulaire > 80μm et images de particules et de plancton permettant l’identification automatique ou assistée. L’application Ecotaxa permet de se faire une idée des données acquises par une dizaine d’UVP depuis dix ans et du type de données qui seront donc disponibles grâce à la multiplication des instruments. Les premières données acquises par l’UVP6 sont déjà disponibles sur le site.
Description technique
La contribution de la DT-INSU consiste à réaliser et/ou à tester l’interfaçage du capteur sur les gliders de type Slocum opérés à la DT-INSU, afin de pouvoir mettre cette solution à la disposition de la communauté française du projet APERO. Cet interfaçage peut se faire à des niveaux très variables de complexité en fonction des ressources en développement logiciel affectées au projet.
Les actions demandées à la DT-INSU porte sur :
- Intégration mécanique et hydrodynamique, étude du ballastage.
- Essais en mer.
Contact DT : Carl Gojak
Contact LOV : Marc Picheral