
Objectifs scientifiques
Cet instrument représente une rupture dans la communauté « paléomagnétisme et magnétisme de roches ». Il s’agit d’un microscope magnétique permettant d’obtenir une image du champ magnétique d’une lame mince avec une résolution d’environ 50 microns. Les mesures magnétiques en sciences de la Terre et de l’Univers sont réalisées sur roche totale. Ainsi, le développement d’un microscope magnétique représente une révolution vers les techniques de mesures in-situ.
Pour la communauté française, de tels développements sont en cours dans trois laboratoires : IPGP (capteurs SQUID froid), CEREGE (technologie diamant quantique) et GET (capteurs GMRs). A l’échelle internationale, des microscopes ont déjà été réalisés dans quelques laboratoires ((Brésil, USA, Japon). Cependant, leur utilisation reste très restreinte en raison de difficultés techniques d’utilisation et de difficultés de traitement des données.
Pourtant, l’obtention de cartographie magnétique permet une révolution dans la communauté avec de nouvelles potentialités dans tous les domaines utilisant cette méthode : géodynamique, environnement, paléoenvironnement, fonctionnement de la géodynamo, archéologie et sciences de l’Univers. Le changement d’échelle permet de comprendre le signal magnétique et de combiner les interprétations avec les données de géochimie et d’imagerie à l’échelle du grain et non plus sur roche totale.
La particularité du microscope développé au GET est d’être basée sur un montage de capteurs à magnétorésistances géantes (GMRs) (collaboration avec le CEA) permettant la mesure du vecteur champ magnétique complet (xyz). Les autres technologies ne permettent généralement que de mesurer un seul axe. Ainsi cet assemblage novateur de GMRs permettrait pour la première fois d’accéder à la mesure complète des vecteurs magnétiques de manière in-situ. Le projet associe un travail sur le traitement de données en lien avec des géophysiciens et modélisateur ainsi que l’équipe du CEA.
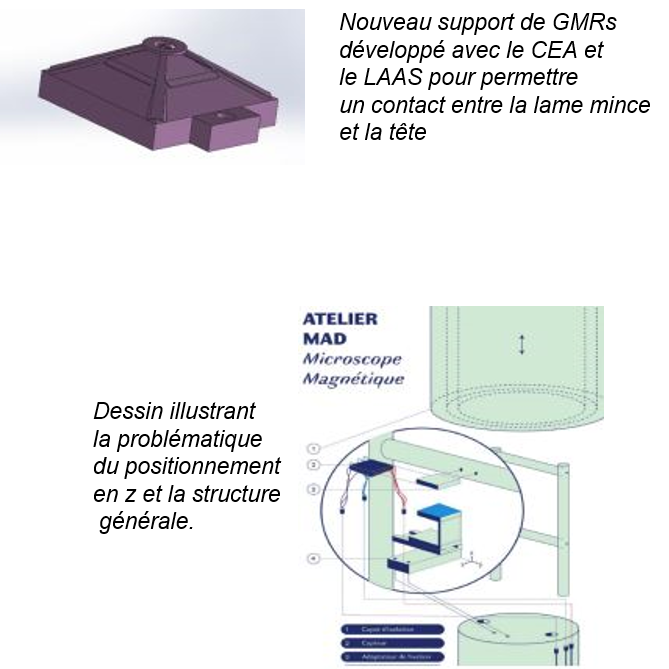
Dans le cas de la mesure magnétique, la maîtrise de la distance entre l’échantillon et le capteur est fondamentale : l’objectif est qu’elle soit la plus petite possible (inf. à 100 microns, le signal diminuant avec le cube de cette distance), et de permettre la modélisation en termes de moment magnétique pour l’interprétation des mesures en tension. La conception d’un système contrôlant la distance capteur/échantillon pourra être utilisée à terme pour le microscope développé à l’IPGP.
Description technique
Le microscope MicMag, en cours de développement au GET, consiste en une structure portant une enceinte mobile en mu-métal permettant de placer l’ensemble échantillon et capteur en champ magnétique réduit (inférieur à 20 nT) afin de permettre la mesure du champ magnétique de la lame mince en s’affranchissant du champ magnétique terrestre ambiant.
Les capteurs GMRs sont fixes. La partie mobile permettant de réaliser les scans est constituée des nanopositionneurs Micronix (boucle fermée) suivant les trois axes x,y et z et d’un support pour la lame mince (en cours de réalisation).
De nombreux tests ont été réalisés en aller-retour avec l’équipe du CEA. Lors de l’été 2021, nous avons pu obtenir les premières cartes brutes sur un échantillon de calibration et sur une lame mince riche en magnétite. Un nouveau montage spécifique de GMRs permet maintenant de réaliser des scans long (plusieurs heures) ne comportant pratiquement pas de dérive (instrumentale ou thermique). Ceci permettra d’obtenir une résolution de mesure importante (25 microns) tout en scannant une zone large (plusieurs mm2). Le système de pilotage sous Labview et d’acquisition de données a été finalisé pendant l’été 2021. En septembre 2022, le programme a été amélioré et est maintenant opérationnel.
L’objet de la demande à la DT-INSU concerne 2 points techniques : le positionnement de la lame mince par rapport au capteur suivant l’axe z (vertical), et l’amélioration de la tête support des capteurs.
Positionnement en z
La distance entre la lame mince et les capteurs est le facteur principal contrôlant l’intensité du signal mesuré, celle-ci diminuant avec le cube de la distance à la source. Pour l’instant, l’acquisition se fait avec une distance estimée d’environ 300 à 500 microns. L’objectif étant que cette distance soit réduite (inf. à 100 microns) et constante pendant le scan. Connaitre cette distance et sa constance pendant le scan est aussi primordiale pour la calibration des mesures (dépendante de la distance). Plusieurs options ont été discutées avec l’équipe du CEA notamment par les tests de l’utilisation d’un diapason ou la possibilité d’un laser. La solution finalement retenue afin d’avoir une distance entre les capteurs et la lame mince la plus faible et contrainte possible a été de modifier la pièce comportant les GMRs afin d’y ajouter un anneau qui sera en contact avec la lame mince et protège les pointes des supports des GMRs. En 2022, en collaboration avec la DT-INSU, un nouveau système de positionnement en Z est en cours de conception avec tests en cours sur les matériaux permettant de garder une certaine souplesse pour ne pas endommager les têtes et pour avoir une distance capteur-échantillon la plus faible possible.
Amélioration de la tête support des capteurs
Suite aux discussions avec la DT-INSU, il est apparu qu’il pourrait être possible d’améliorer la tête support en utilisant un matériau plus résistant et au final de diminuer la distance capteur-surface de la tête.
Contact DT : Nicolas Geyskens :
Contact GET : Melina Macouin :